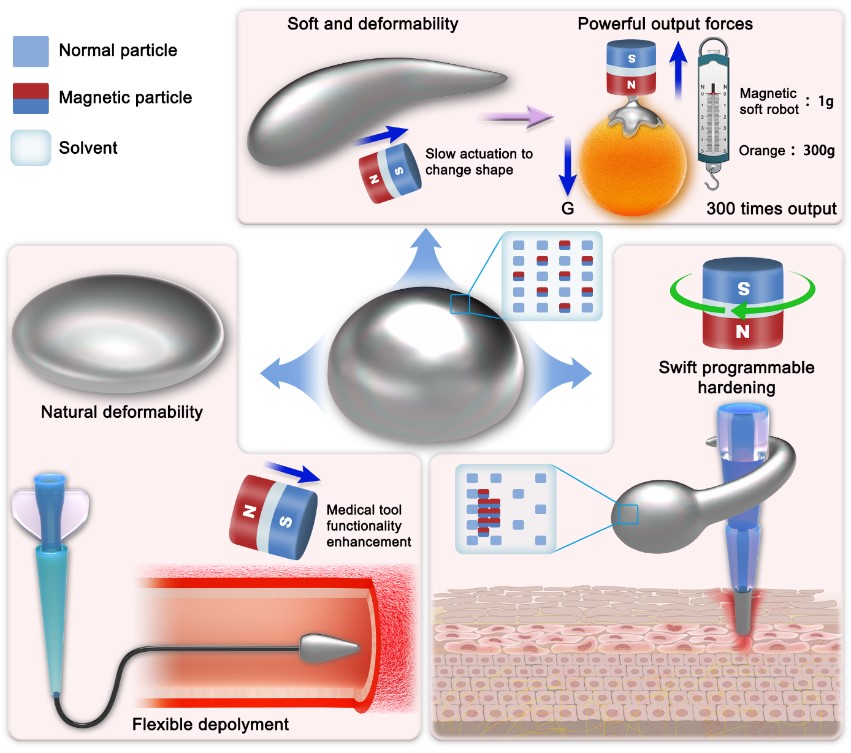
 A schema of the magnetic soft robot
A schema of the magnetic soft robot
A research team led by Xu Qingsong, professor in the Department of Electromechanical Engineering of the Faculty of Science and Technology at the University of Macau (UM), has developed a novel on-demand hardening magnetic soft robot. With the advantages of on-demand hardening and flexible deployment, the robot not only can perform a given task alone with high output forces, but can also be used in conjunction with existing surgical robots, representing a significant advance in the design and application of magnetically controlled robots. The research results have been published in Research, an internationally renowned journal under Science.
Magnetically controlled robots have shown great advantages in medical applications because of their wireless actuation and control characteristics. However, in actual clinical applications, existing magnetically controlled soft robots have limitations, such as limited functions, small output force, and low structural stiffness. Therefore, there is an urgent need for more flexible and adaptive deployment strategies and design methods to fully utilise the performance of magnetically controlled robots and improve their functions. The magnetically controlled soft robot developed by Prof Xu’s research team is capable of switching its stiffness quickly and in a controlled manner, adhering flexibly to the surface of various objects, and providing powerful output forces. The research results offer a promising way to enable magnetically controlled robots to perform more powerful control functions.
The research team’s experimental results show that using a mixture of magnetic particles and non-Newtonian fluidic soft materials to produce magnetic soft robots can achieve programmable hardening, controlled adhesion, soft reconfiguration, and other properties. By applying an external magnetic field, a 1-gram magnetic soft robot can leverage its adhesion and magnetic actuation to pick up an object 300 times its weight. The soft robot can adhere to a variety of object surfaces, enabling the ability of magnetic actuation with improved performance. The soft robot can be used in conjunction with traditional surgical robots to provide precise magnetic navigation and control, as well as a broader range of functions, including adhesion grasping and related operations. In addition, the non-Newtonian properties of the soft robot can be activated by applying a rapidly changing wireless magnetic field. This enables the robot to change between fluid and solid forms in real time and a controlled manner, facilitating swift liquid-solid phase transitions.
The magnetic soft robot developed by Prof Xu’s research team has the following advantages: 1) It has an ultra-soft structure and good adhesion properties that allow flexible deployment, and it can be used in collaboration with existing surgical equipment; 2) Its adhesion properties can be controlled and adjusted by an external magnetic field, which helps perform more functions; 3) It can achieve swift programmable hardening and improve its mechanical strength and stiffness, and provide significant output forces. According to the research team, the realisation of a powerful magnetically controlled robot is of great value for advanced medical applications, and the proposed design ideas and utilisation strategies have reference significance for research in the field.
Prof Xu Qingsong is the corresponding author of the study, and Xu Zichen, a PhD student in the Department of Electromechanical Engineering of UM’s Faculty of Science and Technology, is the first author. PhD student Chen Yuanhe also contributed to the study. The research project was supported by the National Natural Science Foundation of China (File no: 52175556), the Science and Technology Development Fund of the Macao SAR (File no: 0102/2022/A2, 0004/2022/AKP, and 0153/2019/A3), and UM (File no: MYRG2022-00068-FST and MYRG-CRG2022-00004-FST-ICI). The full version of the research article can be viewed at: https://spj.science.org/doi/abs/10.34133/research.0262