

 澳大无人驾驶研究有重大进展
澳大无人驾驶研究有重大进展
澳门大学的无人驾驶研究近日取得两项重大进展,一方面为多变天气及复杂路况下的自动驾驶提供新的思路,另一方面为自动驾驶高精度模型本地化改造提供新的手段。有关成果将分别于两个人工智能顶级年会发表。
近年来深度学习技术的发展大幅提升了机器感知、认知世界的能力。然而现实的任务常常面临测试场景与训练场景不同的问题,例如无人驾驶数据往往在行驶条件比较规范的城市路段获得,这样训练的模型如果直接应用少见的恶劣天气、路况不良等场景,容易造成效果大幅下降。针对此现象,澳大和百度提出了一种周期性重新初始化输出层权重的方法RIFLE,并在大量的真实世界迁移学习任务上验证了RIFLE算法的有效性。在多种模型结构(ResNet、Inception、MobileNet)和多种基础的感知任务(分类、检测、分割)上,RIFLE都有显着的效果提升。此论文的第一作者李兴建是澳大在读博士生,将于人工智能领域公认的顶尖会议 ——国际机器学习年会(International Conference on Machine Learning)发表。
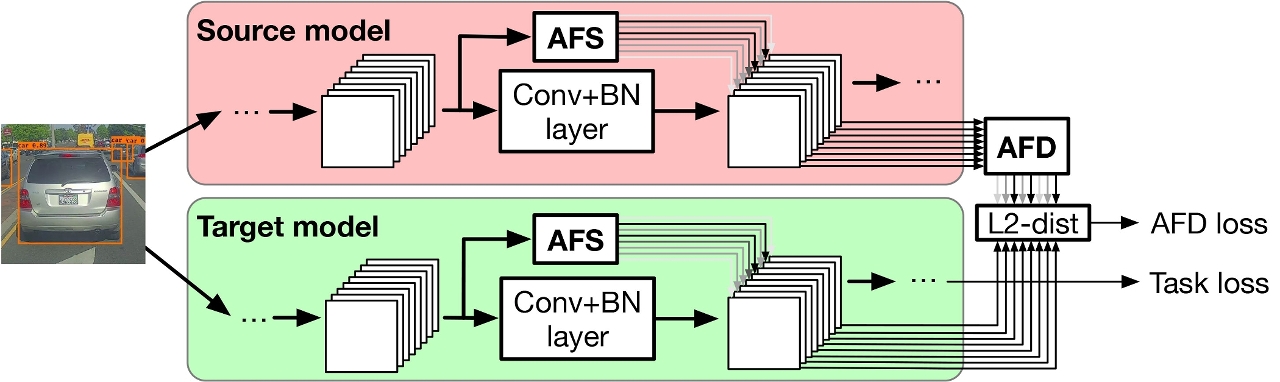
第二项重大进展是澳大、深圳先进院和百度对迁移学习中卷积神经网路模型的压缩问题提出了一种压缩方法,通过边迁移边压缩相互补充的思想,在保证较高准确率的前提下,降低模型复杂度,提高运算速度。针对部分卷积层进行压缩处理,可以进一步降低模型复杂度,同时保证模型的完整性,避免模型准确率骤降。实验结果验证ResNet-101在6个目标资料集上降低30%计算量,准确率几乎保持不变。计算量降低90%以上,在多个资料集上模型还能保持0.70左右的准确率,相比之下,其他方法基本无法正常工作。此论文的第一作者王卡凤是须成忠教授指导的先进院在读博士生,将于另一个顶尖的人工智能领域的会议——国际学习表征年会(International Conference on Learning Representations)发表。
澳大无人驾驶研究是澳门特别行政区科学技术发展基金“重点研发专项资助计划”(檔案编号:0015/2019/AKP)的项目之一,目的是打造粤港澳大湾区一流的无人驾驶群体智能车载平台和车路协同自动驾驶试验基地。项目由澳大智慧城市物联网国家重点实验室联合内地优势单位:中科院深圳先进技术研究院、国防科技大学、百度及深圳海梁科技共同承担;并由澳大科技学院院长须成忠教授领导进行。